Realimentación y Control
miércoles, 18 de mayo de 2011
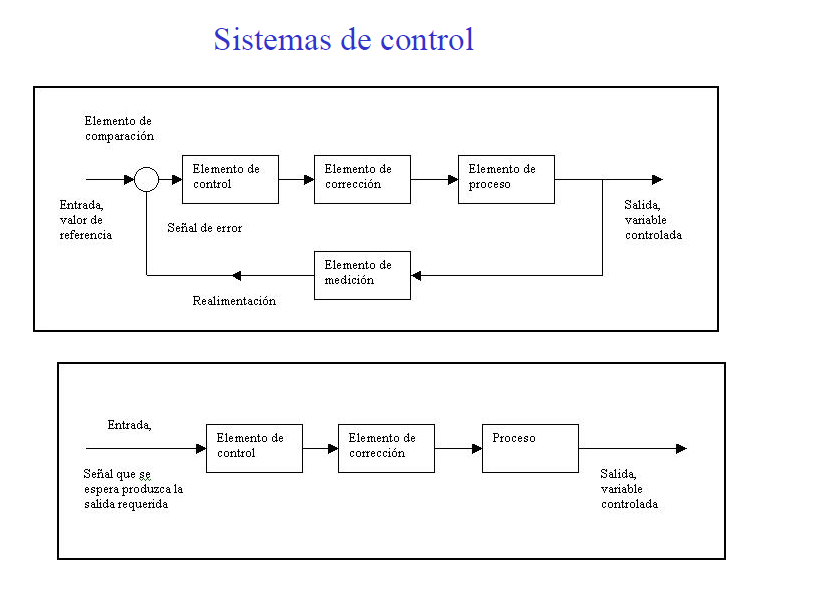
Sistemas de control en lazo cerrado y lazo abierto
En el siguiente enlace, se encuentran las características de los sistemas de lazo abierto y lazo cerrado, así como las teoría de control de éstos dos sistemas.
http://usuarios.multimania.es/automatica/temas/tema2/pags/la_lc/lalc.htm
Construccion lugar geometrico de las raices
En este Pdf se explica de una manera facil el procedimiento necesario para hacer el trazado del lugra geometrico de las raices:
http://prof.usb.ve/montbrun/PS2319LGR%2020%20marzo.pdf
domingo, 15 de mayo de 2011
Analisis lazo cerrado en Scilab
En este enlace se explica la respuesta de un sistema cuando este esta configurado en lazo cerrado, efectuando su simulación en Scilab:
http://www.ing.una.py/APOYO/CONTROL%20CON%20SCILAB/freq/freq.html#clr
martes, 3 de mayo de 2011
lugar geometrico de las raices
Aqui tambien se tiene otro buen material para comprender el trazado del lugar geometrico de las raices:
http://www.ib.cnea.gov.ar/~dsc/capitulo8/rootlocus.htm
Lugar Geometrico de las Raices
En esta presentación se explica como obtener la representación del lugar geometrico de las raices manualmente:
http://www.slideboom.com/presentations/120167/lugar-de-las-raices
lunes, 2 de mayo de 2011
Tutoriales de Control
En esta pagina se muestran varios ejemplos resultos manualmente, y con simulación en MatLab sobre diferentes sitemas y su respuesta en lazo abierto:
1.Modelación sistema barra y bola
http://www.ib.cnea.gov.ar/~instyctl/Tutorial_Matlab_esp/ball.html
2.Sistema de suspensión de un colectivo
http://www.ib.cnea.gov.ar/~instyctl/Tutorial_Matlab_esp/susp.html
3.Modelado posicion de un motor de CC
http://www.ib.cnea.gov.ar/~instyctl/Tutorial_Matlab_esp/motor-1.html
4.Modelado velocidad motor de CC
http://www.ib.cnea.gov.ar/~instyctl/Tutorial_Matlab_esp/motor.html
5.Modelado de un control de marcha
http://www.ib.cnea.gov.ar/~instyctl/Tutorial_Matlab_esp/cc.html
Entradas más recientes
Inicio
Suscribirse a:
Comentarios (Atom)